数据结构第7章:查找
1 总览
查找表:查找表是由同一类型的数据元素(或记录)构成的集合。由于“集合”中的数据元素之间存在着完全松散的关系,因此查找表是一种非常灵便的数据结构,可以用其他的数据结构来实现。
动态查找表:若在查找的同时对表做修改操作(插入删除等)则相应的表称之为动态查找表;否则称之为静态查找表。
平均查找长度ASL(查找算法的评价指标):为确定记录在查找表中的位置,需和给定值进行比较的关键字个数的期望值,称为查找算法在查找成功时的平均查找长度(Average Search Length)。
对查找表常进行的3种操作:
- 查询某个特定的值是否在表中
- 插入一个元素
- 删除一个元素
2 顺序查找和折半查找
2.1 顺序查找
算法思想:通过数组下标递增来顺序操作每个元素,返回结果。
优点:对数据存储结构没有任何要求。
缺点:平均查找长度$ASL=n$,效率较低。
2.2 折半查找
折半查找是一种效率高效的查找方法,但是仅适用于有序的顺序表。
折半查找算法思路:(非递归)
- 设表长为n、low、high和mid分别指向待查元素所在区间的上界、下界和中点,key为给定的要查找的值。
- 初始时,令low=1,high=n,mid=[(low+high)/2]。
- 让k与mid指向的记录比较;若key==R[mid].key,查找成功;若key<R[mid].key,则high=mid-1;若key>R[mid].key,则low=mid+1;若low>high,则返回0代表元素不存在。
1 | bool check(int mid) |
折半查找的过程可以用判定树来表示,把顺序表中的每个元素查找到所用的查找次数写出来,然后次数为1的作为树的根结点,然后查找次数为2的放到第二层,依次把每个元素放到树中。
查找成功时的查找长度为从根结点到目的结点的路径上的结点数,而查找失败为从根结点到对应失败结点的父结点的路径上的结点数。每个结点的值均大于其左子结点,均小于其右子结点。
折半查找的时间复杂度为$O(logn)$,要求线性表必须具有随机存取的特性,仅适用于顺序存储结构,不适于链式存储结构。
2.3 分块查找
分块查找是一种性能介于顺序查找和折半查找之间的一种查找方法。
算法思想
- 将表分成几块,且表或者有序,或者分块有序;即若$i < j$,则第j块中所有记录的关键字均大于第$i$块中的最大关键字。(注意在块内元素可以是无序的)。
- 建立索引表(每个结点含有最大关键字域和指向本块第一个结点的指针,且按关键字有序)。
查找过程:首先确定待查记录所在块(顺序或折半查找),再在块内查找(顺序查找)。
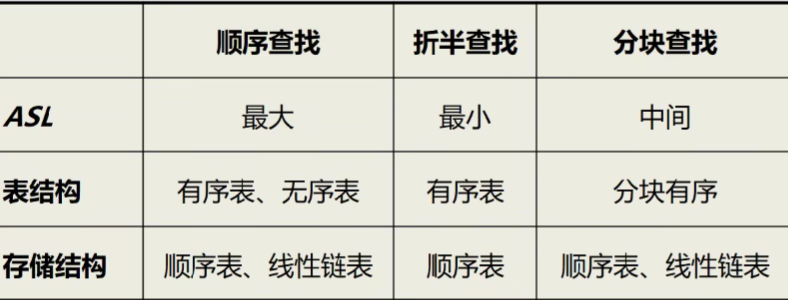
2.4 上述三种查找对比
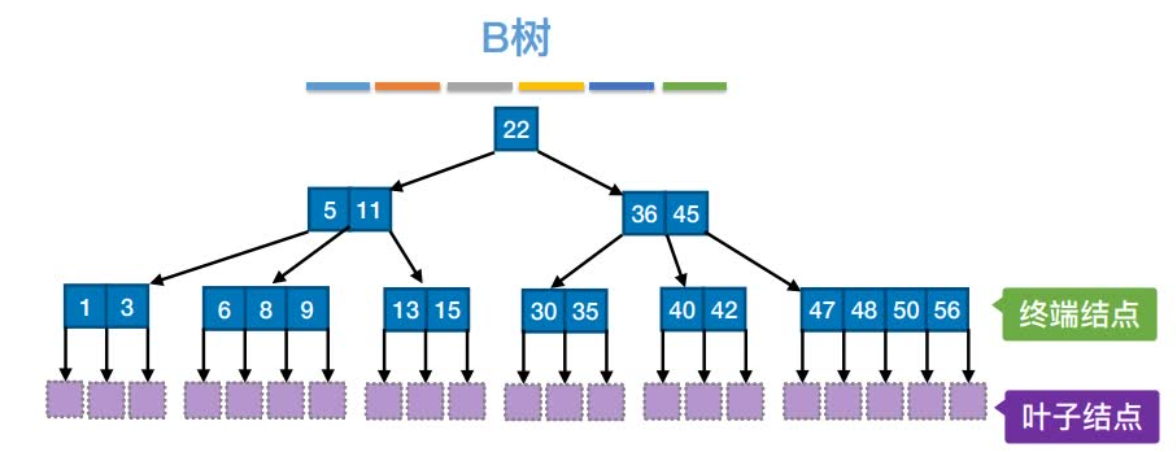
3 B 树
B树,又称多路平衡查找树,B树中所有结点的孩子个数的最大值成为B树的阶,通常用$m$表示。
在大多数的平衡查找树(Self-balancing search trees),比如 AVL 树和红黑树,都假设所有的数据放在主存当中。那为什么要使用 B-树呢(或者说为啥要有 B-树呢)?要解释清楚这一点,我们假设我们的数据量达到了亿级别,主存当中根本存储不下,我们只能以块的形式从磁盘读取数据,与主存的访问时间相比,磁盘的 I/O 操作相当耗时,而提出 B-树的主要目的就是减少磁盘的 I/O 操作。
大多数平衡树的操作(查找、插入、删除,最大值、最小值等等)需要$O(h)$次磁盘访问操作,其中 $h$ 是树的高度。但是对于 B-树而言,树的高度将不再是 $O(logn)$ (其中 $n$ 是树中的结点个数),而是一个我们可控的高度 $h$(通过调整 B-树中结点所包含的键【你也可以叫做数据库中的索引,本质上就是在磁盘上的一个位置信息】的数目,使得 B-树的高度保持一个较小的值)。
一般而言,B-树的结点所包含的键的数目和磁盘块大小一样,从数个到数千个不等。由于B-树的高度 $h$ 可控(一般远小于 $logn$),所以与 AVL 树和红黑树相比,B-树的磁盘访问时间将极大地降低。
3.1 B 树的特性
- 所有的叶子结点都出现在同一层上,并且不带信息(可以看做是外部结点或查找失败的结点,实际上这些结点不存在,指向这些结点的指针为空)。
- 每个结点包含的关键字个数有上界和下界。用一个被称为 B-树的最小度数的固定整数 t ≥ 2 来表示这些界,其中 t 取决于磁盘块的大小:
- 除根结点以外的每个结点必须至少有 t - 1 个关键字。因此,除了根结点以外的每个内部结点有 t 个孩子。如果树非空,根结点至少有一个关键字。
- 每个结点至多包含 2t - 1 个关键字。
- 一个包含 x 个关键字的结点有 x + 1 个孩子;
- 一个结点中的所有关键字升序排列,两个关键字 $ k_{1} $ 和 $ k_{2} $ 之间的孩子结点的所有关键字 key 在 ($ k_{1} $, $ k_{2} $) 的范围之内。
- 与二叉排序树不同, B-树的搜索是从根结点开始,根据结点的孩子树做多路分支选择,而二叉排序树做的是二路分支选择,每一次判断都会进行一次磁盘 I/O 操作。
- 与其他平衡二叉树类似,B-树查找、插入和删除操作的时间复杂度为 $O(logn)$ 量级。
3.2 B 树的查找
B树的查找包含两个基本操作:
- 在B树中找结点
- 在结点内找关键字
B树常存储在磁盘上,第一个操作是在磁盘上进行的,后一个查找操作是在内存中进行的。在结点内通常采用顺序查找或折半查找。
- 将给定值与根结点关键字相比较,如果相等,那么查找成功。
- 如果小于$K_i$,那么下次从以 $A_i-1$ 为根的子树中查找。否则下次从以 $A_i+1$ 为根的子树中查找。
- 如果查找到叶子结点,那么查找失败。
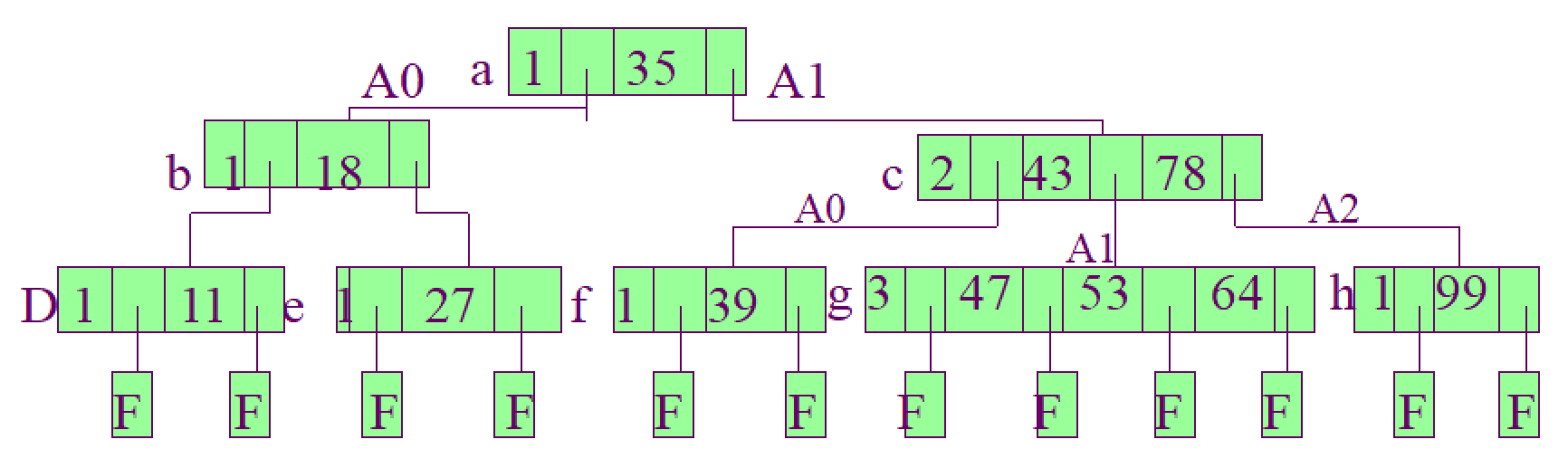
例如,在4阶B-树中查找给定值26,首先与根结点上的关键字35比较。因为26<35,所以,由A0找到结点B。因为26>18,再与结点E上的关键字比较,26<27,而该结点的A0子树为失误结点叶子。所以,确定该树中不存在26,查找失败。
3.3 B 树的插入
在B树中找到插入的位置后,并不能简单地将其添加到终端结点,因为此时可能会导致整棵树不符合B树定义中的要求,插入过程如下:
- 从根结点开始按照查找的过程确定给定值应插入的结点位置P。
- 如果该结点上的关键字个数少于 m - 1 个,则将给定值直接插到该结点上。
- 如果应插入的结点上,已有 m - 1 个关键字,那么,必须把该结点分裂成两个结点;(P、P’) 。
分裂的方法是:
取一个新的结点,在插入key后的原结点,从中间位置 m / 2(向上取整)将其中的关键字分为两部分,左部分包含的关键字放在原结点,右部分的关键字放在新结点中,中间位置 m / 2(向上取整)的结点插入原结点的父节点。
如果此时导致父结点的关键字个数也超过了上限,继续进行这种分裂,直到传递到根节点位置。
举例如下: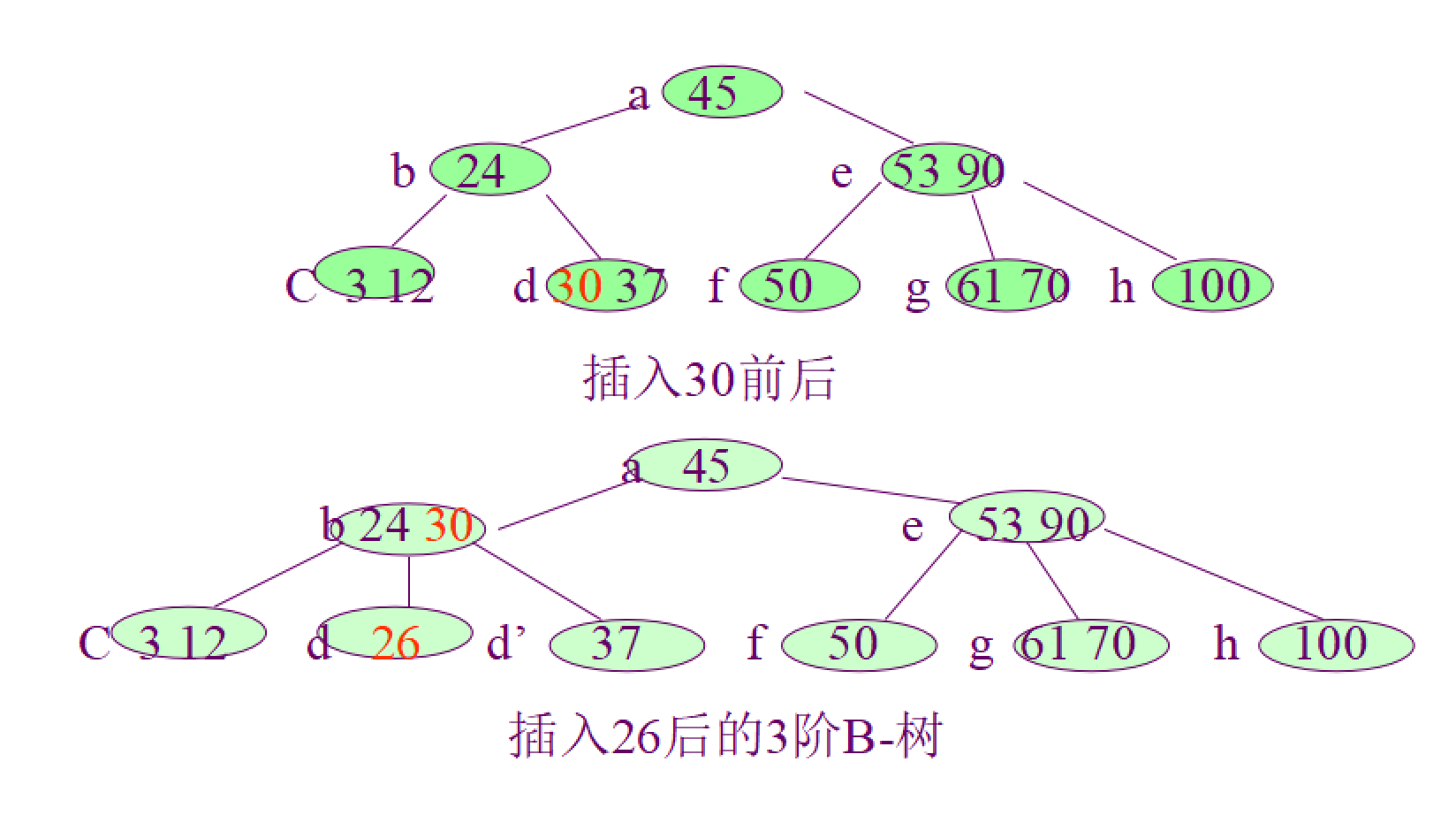
3.4 B 树的删除
B树的删除操作与插入类似,但是复杂一些,因为可能涉及结点的合并。
4 B+树
B+树是应数据库所需出现的一种B树的变形树。
一棵m阶的B+树和m阶的B-树的差异在于:
- 有n棵子树的结点中含有n个关键字。
- 所有的叶子结点中包含了全部关键字的信息,以及指向含这些关键字记录的指针,且叶子结点本身依关键字的大小自小而大顺序链接。
- 所有的非终端结点可以看成是索引部分,结点中仅含有其子树(根结点)中的最大(或最小)关键字。

可以看出,分支结点的某个关键字是其子树中最大关键字的副本。通常在B+树中有两个头指针:一个指向根节点,另一个指向关键字最小的叶结点。
因此,可以对B+树进行两种查找运算:
- 从最小关键字开始的顺序查找
- 从根节点开始的多路查找
为什么数据库不适用哈希索引?
- 因为数据库查找中通常有很多范围查找,但是哈希值是无序的,所以不能使用。
5 散列表
前面讨论的线性表、树表结构的查找方法,这类查找方法都是以关键字的比较为基础的。而散列表的思想是通过对元素的关键字值进行某种运算,直接求出元素的地址,即使用关键字到地址的直接转换方法,而不需要反复比较。
散列函数和散列地址:在记录的存储位置$p$和其关键字$key$之间建立一个确定的对应的关系$H$,使$p=H(key)$,称这个对应关系$H$为散列函数,$p$为散列地址。
散列方法(杂凑法):选取某个函数,依该函数按关键字计算元素的存储位置,并按此存放;查找时,由同一个函数对给定值$k$计算地址,将$k$与地址单元中元素关键码进行比对,确定查找是否成功。
散列表:一个有限连续的地址空间,用以存储按散列函数计算得到相应散列地址的数据记录。通常散列表的存储空间是一个一维数组,散列地址是数组的下标。
冲突和同义词:对不同的关键字可能得到同一散列地址,即$key_1 \neq key_2$,而$H(key_1) = H(key_2)$,这种现象称为冲突。具有相同函数值的关键对该散列函数来说称作同义词,$key_1$与$key_2$互称为同义词(冲突是不可避免的,我们只能尽可能减少)。
5.1 散列函数的构造方法
在构造散列函数时,必须注意以下几点:
- 构造好的散列函数,所选函数尽可能简单,以便提高转换速度。
- 所选函数对关键码计算出的地址,应在散列地址集中致均匀分布,以减少空间浪费。
- 制定一个好的解决冲突的方案,查找时如果从散列函数计算出的地址查不到关键码,则应当依据解决冲突的规则,有规律的查询其它相关单元。
5.1.1 直接定址法
直接取关键字的某个线性函数值为散列地址,散列函数为$H(key) = a × key + b$。

这类函数计算简单,分布均匀,不会产生冲突,但要求地址集合与关键词集合大小相同,因此,对于较大的关键词集合不适用。所以在现实应用中并不常用。
5.1.2 除留余数法
现实应用中比较常用的方法是除留取余法。假设散列表长为TableSize(TableSize的选取,通常由关键词集合的大小n和允许最大装填因子α决定,一般将TableSize取为 n / α ),选择一个正整数p<=TableSize,散列函数为:
$$
h(key) = key \% p
$$
即取关键词除以p的余数作为散列地址。使用除留取余法,选取合适的p很重要,一般选取p为小于或等于散列表长TableSize的某个最大素数比较好。
用素数求得的余数作为散列地址,比较均匀分布在整个地址空间上的可能性较大。

5.1.3 数字分析法
设关键字是 r 进制数(如十进制数),而 r 个数码在各位上出现的频率不一定相同,此时应选取数码分布较均匀的若干位作为散列地址。
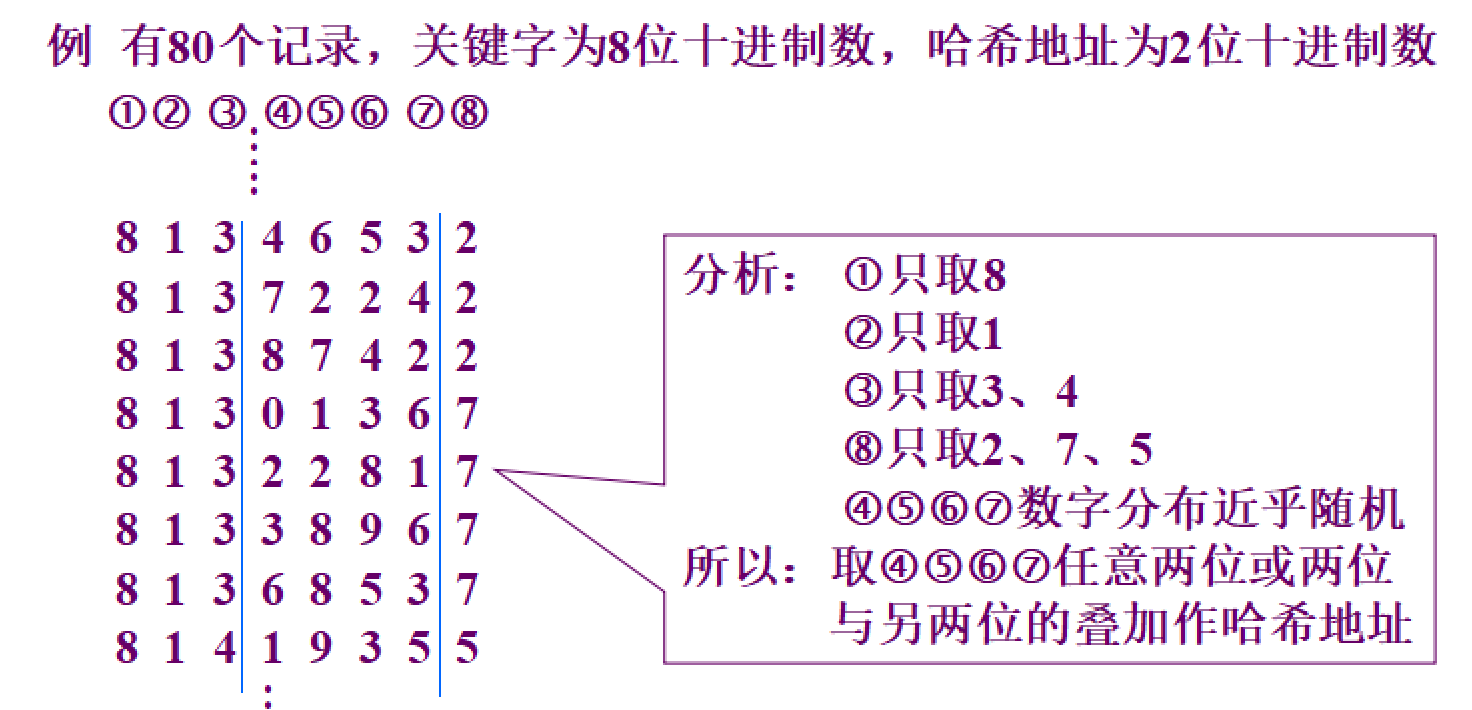
这种方法适用于已知的关键字集合,若更换了关键字,则需要重新构造新的散列函数。
5.1.4 平方取中法
构造:取关键字平方后中间几位作哈希地址
适用范围:关键字的每位取值都不够均匀或均小于散列地址所需的位数。
在不同的情况下,不同的散列函数具有不同的性能,因此不能笼统地说哪种散列函数最好。在实际选择中,采用何种构造散列函数的方法取决于关键字集合的情况,但目标是尽量降低产生冲突的可能性。
5.2 处理冲突的方法
5.2.1 开放定址法
当冲突发生时,形成一个探查序列;沿此序列逐个地址探查,直到找到一个空位置(开放的地址),将发生冲突的记录放到该地址中,即:
$$
H i=(H(k e y)+d i) \% m, \quad i=1,2, \cdots \cdots \cdot k(k \leq m-1)
$$
其中:H(key)是哈希函数,m是哈希表表长,di是增量序列。
取定某一增量序列后,对应的处理方法就是确定的,通常有以下4中取法。
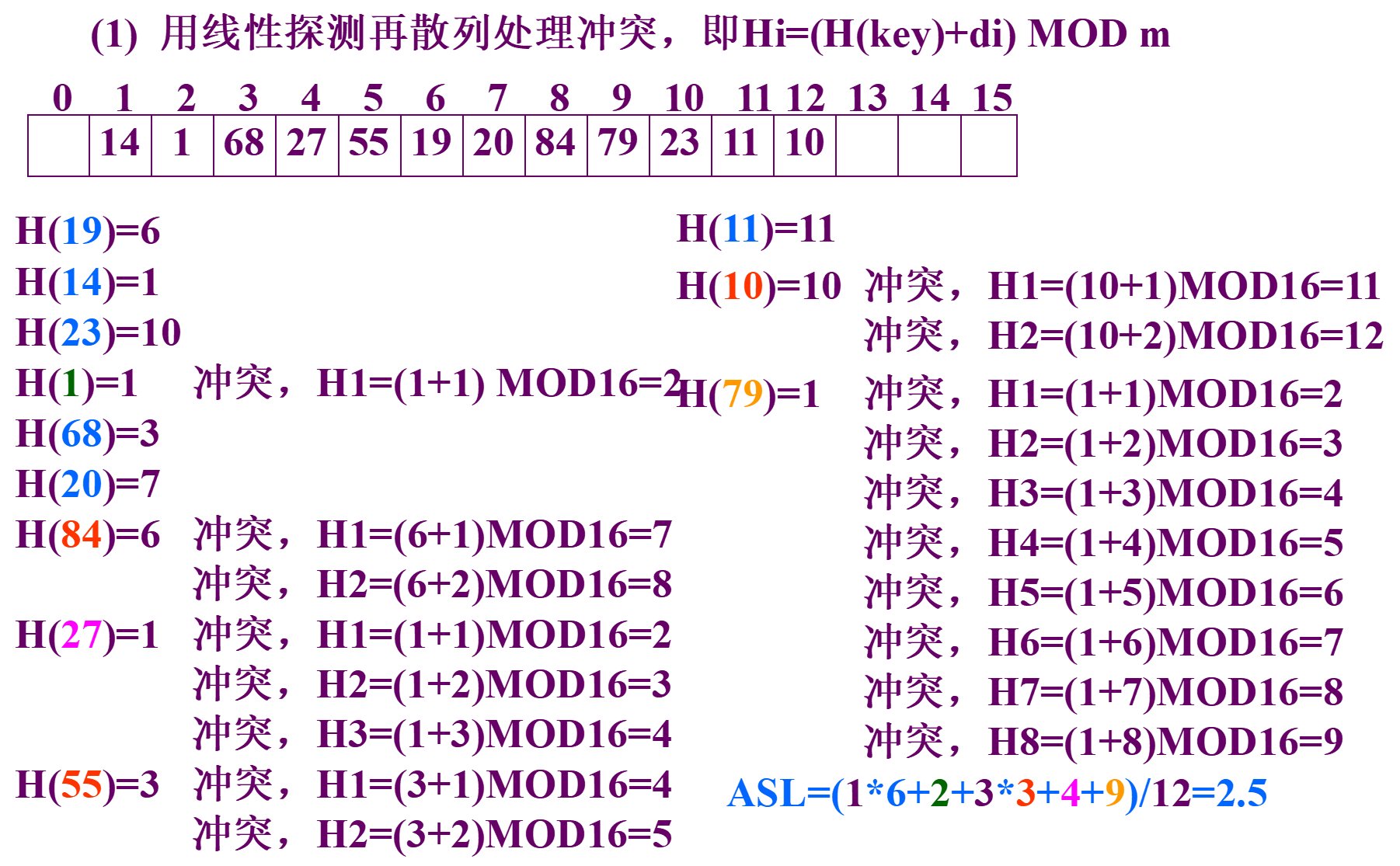
5.2.1.1 线性探测法
$$
f_{i}(k e y)=\left(f(k e y)+d_{i}\right) \% m\left(d_{i}=1,2,3, \cdots, m-1\right)
$$
使用该公式用于解决冲突的开放定址法称为线性探测法。
对于线性探测法,在出现冲突时,它只能晚后一步一步检测看是否有空位置,假设此时该冲突位置后续没有可用位置,但前面有一个空位置。尽管可以不断地求余数后得到结果,但效率很差。
5.2.1.2 二次探测法
因此可以改进该算法,增加双向寻找可能的空位置,这种新算法称为二次探测法:
$$
f_{i}(k e y)=\left(f(k e y)+d_{i}\right) \% m\left(d_{i}=1^{2},-1^{2}, 2^{2},-2^{2}, \cdots, q^{2},-q^{2}, q \leq m / 2\right)
$$
散列表长度m必须是一个可以表示成4k+3的素数,才能保证探测到所有位置。
为什么?
缺点是不能探测到散列表上的所有单元,但至少到探测到一半单元。
5.2.1.3 随机探测法
此外还有一种方法是,在冲突时,对于位移量$d_{i}$采用随机函数计算得到,称为随机探测法:
$$
f_{i}(k e y)=\left(f(k e y)+d_{i}\right) \% m\left(d_{i}\right. 是一个随机数列 )
$$
这里的随机其实是伪随机数,即设置相同的随机种子,则不断调用随机函数的过程中就可以生成不会重复的数列。
同时,在查找时,用同样的随机种子,它每次得到的数列也是相同的。
例:表长为11的哈希表中已填有关键字为17,60,29的记录,H(key)=key % 11,现有第4个记录,其关键字为38,按三种处理冲突的方法,将它填入表中。

5.2.1.4 再散列函数法
当通过第一个散列函数得到的地址发生冲突时,则利用第二个散列函数计算该关键字的地址增量。即提供多个散列函数:
$$
f_{i}(k e y)=(f(key)+i\times f_{2}(key))%m
$$
在再散列法中,最多经过m - 1 次探测就会遍历表中所有位置。
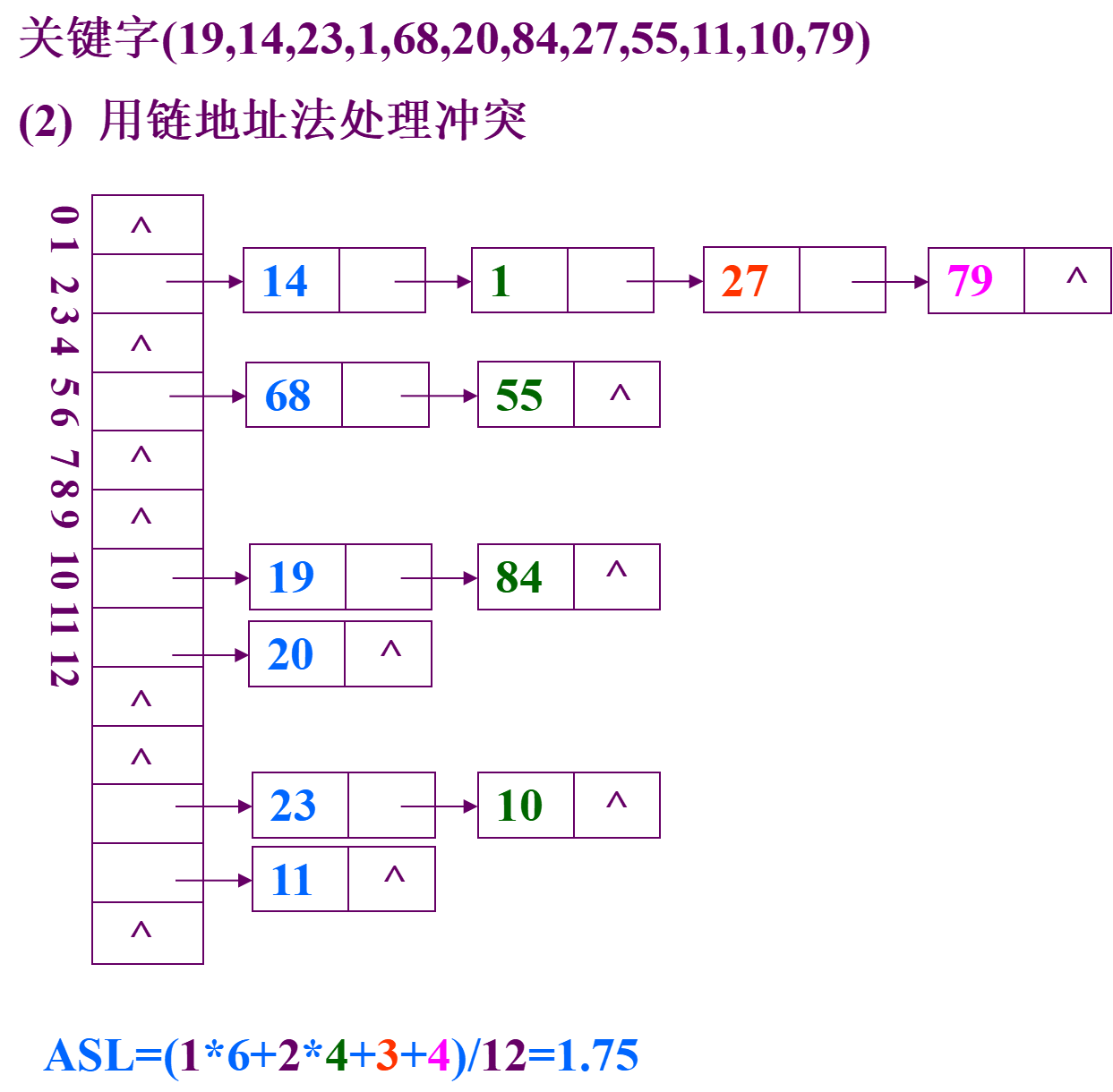
5.2.2 拉链法
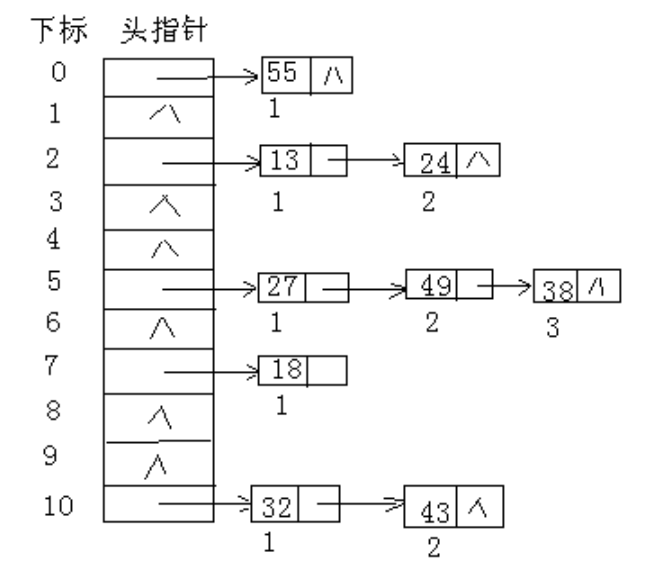
用拉链法处理冲突的办法是:把具有相同散列地址的关键字(同义词)值放在同一个单链表中,称为同义词链表。
有m个散列地址就有m个链表,同时用指针数组T[0..m-1]存放各个链表的头指针,凡是散列地址为i的记录都以结点方式插入到以T[i]为指针的单链表中。T中各分量的初值应为空指针。
用拉链法处理冲突,虽然比开放定址法多占用一些存储空间用做链接指针,但它可以减少在插入和查找过程中同关键字平均比较次数(平均查找长度),这是因为,在拉链法中待比较的结点都是同义词结点,而在开放定址法中,待比较的结点不仅包含有同义词结点,而且包含有非同义词结点,往往非同义词结点比同义词结点还要多。
5.3 散列查找及性能分析
散列表的查找过程与构造散列表的过程基本一致,对于一个给定的关键字key,根据散列函数可以计算出其散列地址。
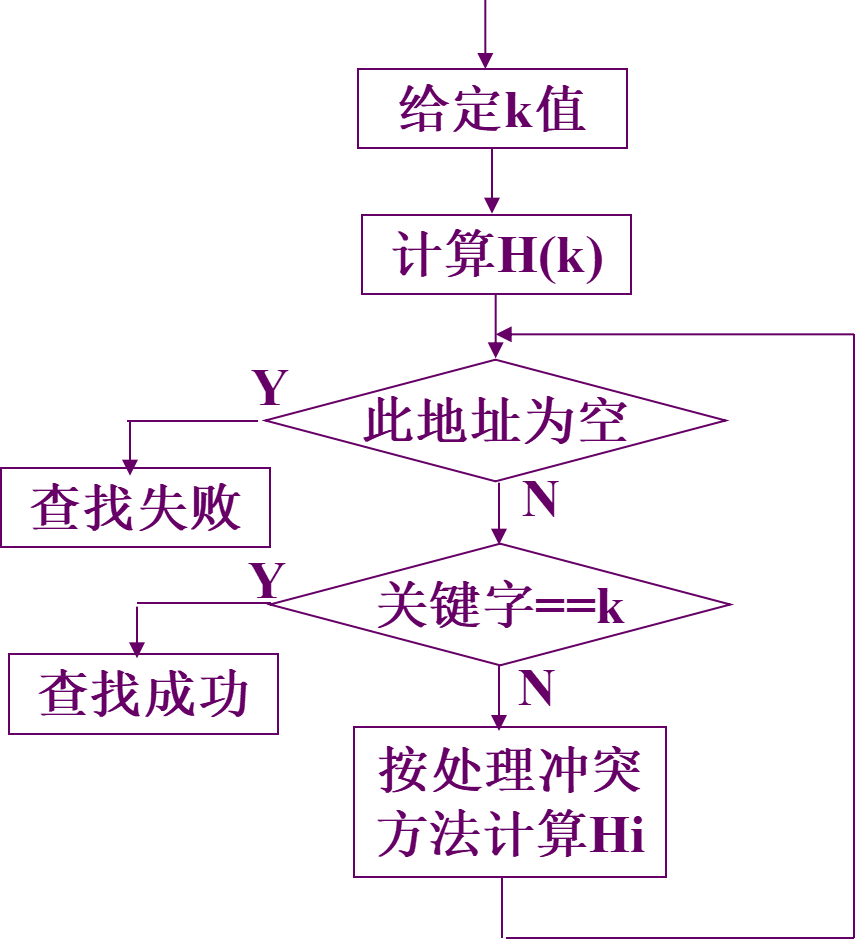
哈希查找过程仍是一个给定值与关键字进行比较的过程,评价哈希查找效率仍要用ASL。
哈希查找过程与给定值进行比较的关键字的个数取决于:
哈希函数
处理冲突的方法
哈希表的填满因子α = 表中填入的记录数 / 哈希表长度
例:已知一组关键字(19,14,23,1,68,20,84,27,55,11,10,79),哈希函数为:H(key)=key % 13, 哈希表长为m=16,设每个记录的查找概率相等。
 微信
微信 支付宝
支付宝